喜欢0次
在dtcm和itcm等模块中经常用到以valid,read结尾的信号量,他们就是握手信号。
握手信号是一种用于协调和同步不同系统之间操作的信号。当两个或多个系统要进行数据传输或交互时,需要确保数据传输的正确性和安全性。握手信号则可以确保数据传输的可靠性和正确性。
握手信号通常由几个信号线组成,并在数据传输开始和结束时进行协调和同步。在传输数据之前,发送方会发送一个握手信号给接收方,确认接收方是否已经准备好接收数据。如果接收方准备好接收数据,则发送方会继续发送数据。在数据传输完成后,发送方会再次发送一个握手信号来告知接收方传输完成,以确保接收方已经成功接收到数据。
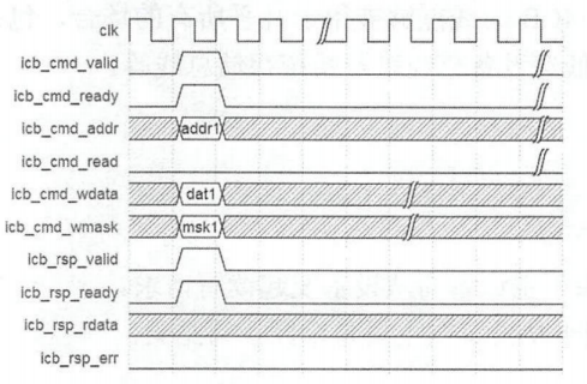
主设备通过 ICB 的命令通道向从设备发送写操作请求( icb cmd read 为低〉,从设备
立即接收该请求( icb _crud _ready 为高〉
从设备在同一个周期返回反馈且结果正确( icb_rsp_err为低〉,主设备立即接收该结
果( icb _rsp _ready 为高〉如下图所示
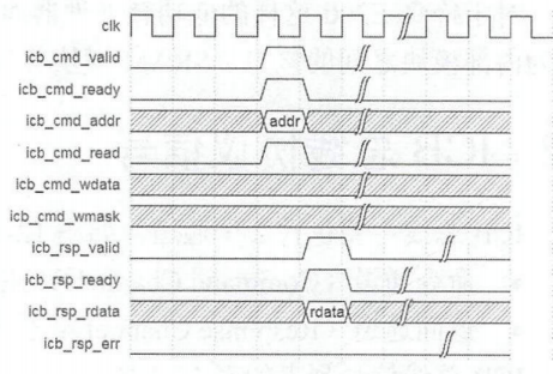
主设备通过 ICB 的命令通道向从设备发送读操作请求(icb cmd read 为高〉,从设备
立即接收该请求( icb cmd _ready 为高)
从设备在下一个周期返回反馈且结果正确( icb _rsp _err 为低), 主设备立即接收该结果( icb _rsp _ready 为高)
主设备通过 ICB 的命令通道向从设备发送写操作请求( icb cmd read 为低),从设备
立即接收该请求( icb _ cmd ready 为高)
从设备在下一个周期返回反馈且结果正确(icb_rsp 为{邸,主设备立即接收该结
果( icb _rsp _ready 高)。