算法原理:
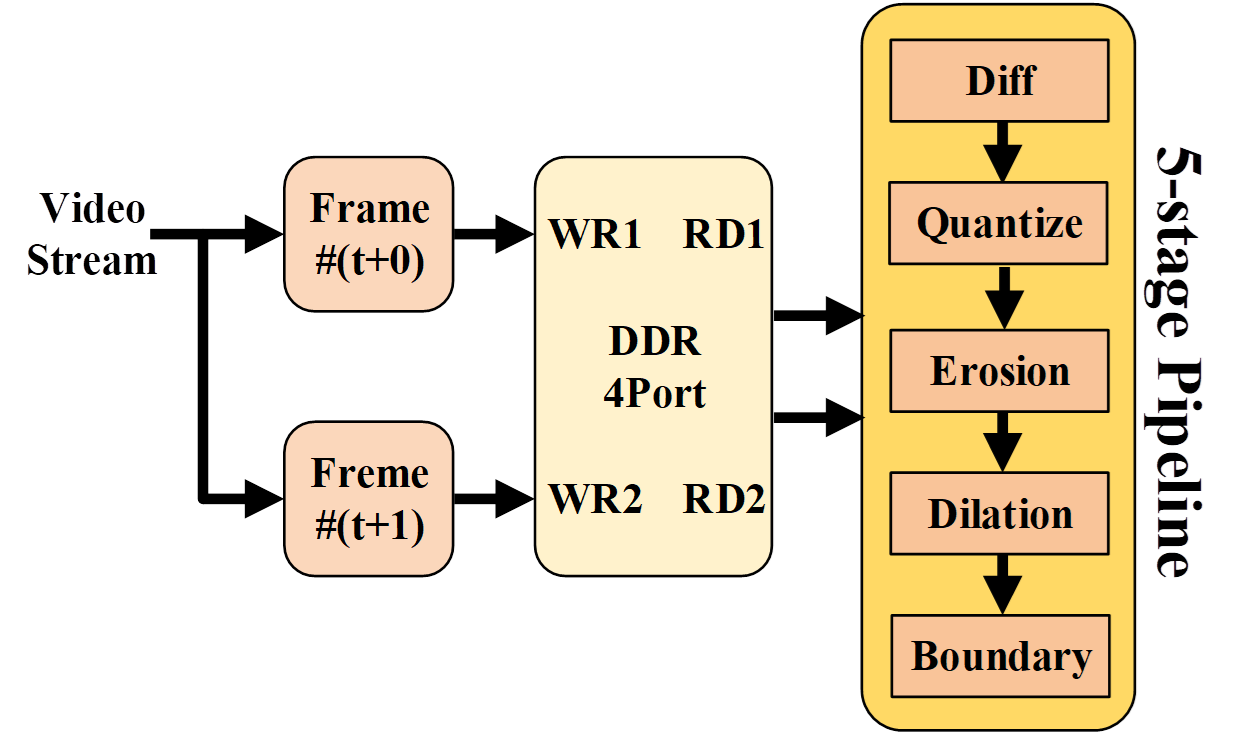
由于场景中的目标在运动,目标的影像在不同图像帧中的位置不同。该类算法对时间上连续的两帧或三帧图像进行差分运算,不同帧对应的像素点相减,判断灰度差的绝对值,当绝对值超过一定阈值时,即可判断为运动目标,从而实现目标的检测功能。
将算法硬化的主要流程图如下: