喜欢2次
大家好,我们是大黄蜂队,编号是 CICC1948。此贴将简要介绍在目标追踪领域最为基础的模板匹配算法,并分析对其作硬件加速的思路。
一、目标追踪和图像识别
一般来说,提到机器视觉这个概念都会想到图像识别,比如人脸识别、文本识别等等,目标追踪这个概念在平时接触的相对比较少。但实际上,目标追踪可以理解为图像识别的动态过程:图像识别往往是先在一个静态的图象中寻找到某一片像素区域(比如从背景画面中框选出人脸或文字),然后再对这片像素区域作分析(比如提取人脸关键点信息等等);而目标追踪则是在一段视频流中进行,它根据指定的追踪目标的信息在视频的每一帧图象中进行搜寻,获取每一帧中目标的大小和坐标。对视频流作目标追踪的好处是,我们不仅可以动态地对物体进行定位,还可以由此分析出被追踪物体的速度、加速度等参数,如下面这段动图所示:
二、目标追踪的分类与难点
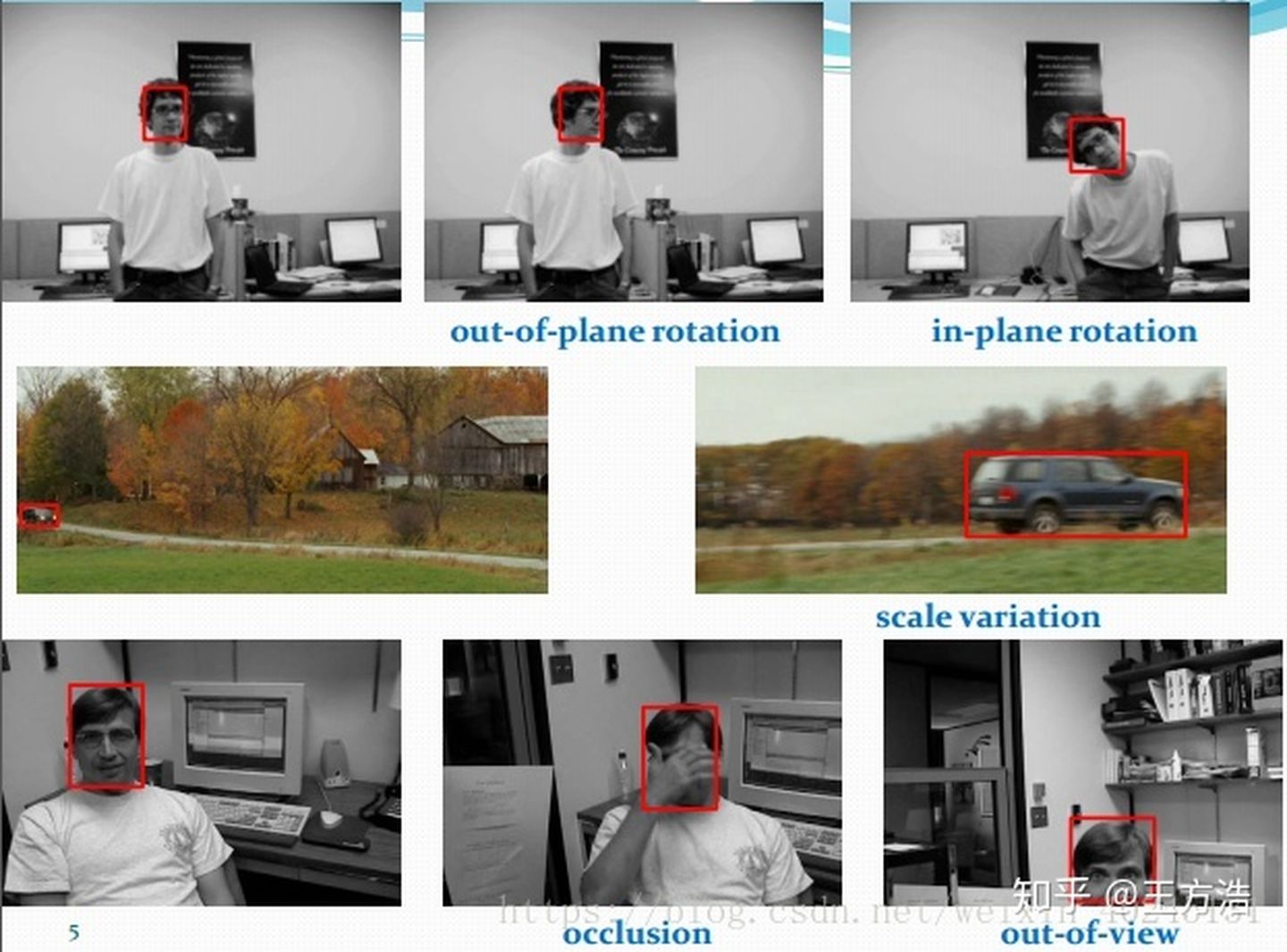
目标追踪可以分为单目标跟踪、多目标跟踪、多目标多摄像头跟踪(MTMCT)、姿态跟踪等。相比于单纯地在一幅图中找到某一个物体,在一段视频流中执行的目标追踪往往会面临一些更加复杂的情况。比如:形态变化,即运动目标并不是一直保持同一个姿态。尤其是在对于运动员、行人等姿态在不断进行快速变化的目标的追踪中,往往会因此引入不少的噪声;尺度变化,即运动目标在视频中和摄像头的距离并不是一直不变的,当目标靠近或者远离摄像头的时候,在视频中就会表现出目标尺度大小的变化,这给算法的自适应能力带来了挑战;遮挡与消失,即目标物体在运动过程中可能会被其他物体短暂地遮挡,因此需要算法能够在目标重新出现在帧图象中时,迅速地重新捕捉到目标。
以上对目标追踪这一领域做了简要的说明,下面将会介绍目标追踪算法中最简单的一种 —— 模板匹配算法。
三、模板匹配算法
模板匹配(TemplateMatching)是在图像中寻找目标的方法之一。原理很简单,就是把待追踪的目标图像存于一个模板中,然后在视频的每一帧图像中寻找和模板图像最相似的区域。
那么,如何才能评估图像中某一片像素区域和模板图像的相似程度呢?常用的算法是计算两幅图像的 绝对误差和(SAD)。我们把图像区域和模板图像都转为灰度,这个用经典的心理学公式可以实现;然后把图像区域和模板中对应位置像素点的灰度值相减并取绝对值,这就代表了图像中每个像素点图像和模板间的差距,即“绝对误差”;最后把这所有的绝对误差相加得到绝对误差和(SAD),就可以代表正片图像区域和模板之间的差别,SAD 越小,就表明图像和模板之间的差别越小。
因此,模板匹配算法步骤就很明确了:用模板在整帧图像中扫描,对于一个超清视频(1280*720 P)如果我们用 50*50 大小的模板进行匹配,扫描完整个图像就需要运算(1280-50+1)*(720-50+1)= 826001 次。每次运算都会计算出一个 SAD 值,而我们只要找到这个最小的 SAD 值对应的模板所在位置,就可以认为找到了帧图像中和模板最为接近的一片像素区域。
四、硬件加速思路
在分析硬件加速之前,首先要弄明白这个算法在软件实现中有哪些冗余的操作:首先是遍历次数多(前文算出来的就已经达到了 82.6 万次),每次遍历都需要对 50 * 50=2500 个像素点作减法、再取绝对值、把 2500 个绝对值加到一起才得到最终的 SAD 值,这样的计算过程太过繁琐。另外,假如每一帧的图像都存放在内存中,那么每次遍历都需要额外从内存中读入一些像素点的灰度值,这段访存的操作带来了时间上的消耗;当视频的大小超过了内存的容量,很可能就需要把数据存放在外存,导致访存所需的时间进一步增加。
而硬件计算的好处,就是可以对很多个数据作并行操作,而不用像 CPU 那样只能串行的处理数据。并且,我们可以通过自定义一组寄存器阵列,将部分帧数据暂存于寄存器阵列中,就省下了之后访存所需的时间。比如我一次性把一大块像素区域都存在一个寄存器阵列中,那么每次匹配的时候,我可以直接从寄存器阵列里选出一片 50 * 50 的像素区域与模板进行比较,而不用访问存储器中原视频的帧数据;并且我可以同时对 2500 个像素点作减法,这在一个时钟周期就可以完成,速度会比软件实现快很多。
此外,在算法层面也可以作改进:比如我可以尝试预先判断某些区域是不是物体最可能移动到的位置,优先对这片区域的图像进行模板匹配,而在此之外的区域就可以不管。总之,软硬件层面加速的手段还是很多的。
以上就是我们对于目标追踪和模板匹配、及其硬件加速思路的分享,之后也会陆续更新一些图像处理相关的分享贴。由于我们整体的方案还是比较简单,所以希望大佬们轻喷(逃)
End